TiROD
TiROD: Tiny Robotics Dataset and Benchmark for Continual Object Detection

Abstract
This is the official website for the TiROD dataset and benchmark.
Detecting objects in mobile robotics is crucial for numerous applications, from autonomous navigation to inspection. However, robots are often required to perform tasks in different domains with respect to the training one and need to adapt to these changes. Tiny mobile robots, subject to size, power, and computational constraints, encounter even more difficulties in running and adapting these algorithms. Such adaptability, though, is crucial for real-world deployment, where robots must operate effectively in dynamic and unpredictable settings. In this work, we introduce a novel benchmark to evaluate the continual learning capabilities of object detection systems in tiny robotic platforms. Our contributions include:
- Tiny Robotics Object Detection~(TiROD), a comprehensive dataset collected using a small mobile robot, designed to test the adaptability of object detectors across various domains and classes;
- an evaluation of state-of-the-art real-time object detectors combined with different continual learning strategies on this dataset, providing detailed insights into their performance and limitations;
- moreover, we publish the data and the code to replicate the results to foster continuous advancements in this field. Our benchmark results indicate key challenges that must be addressed to advance the development of robust and efficient object detection systems for tiny robotics.
🌐 Links
📊 Dataset Information
| Attribute | Description |
|---|---|
| Name | TiROD |
| Number of Images | 17.4K |
| Images Size | 640x480x3 |
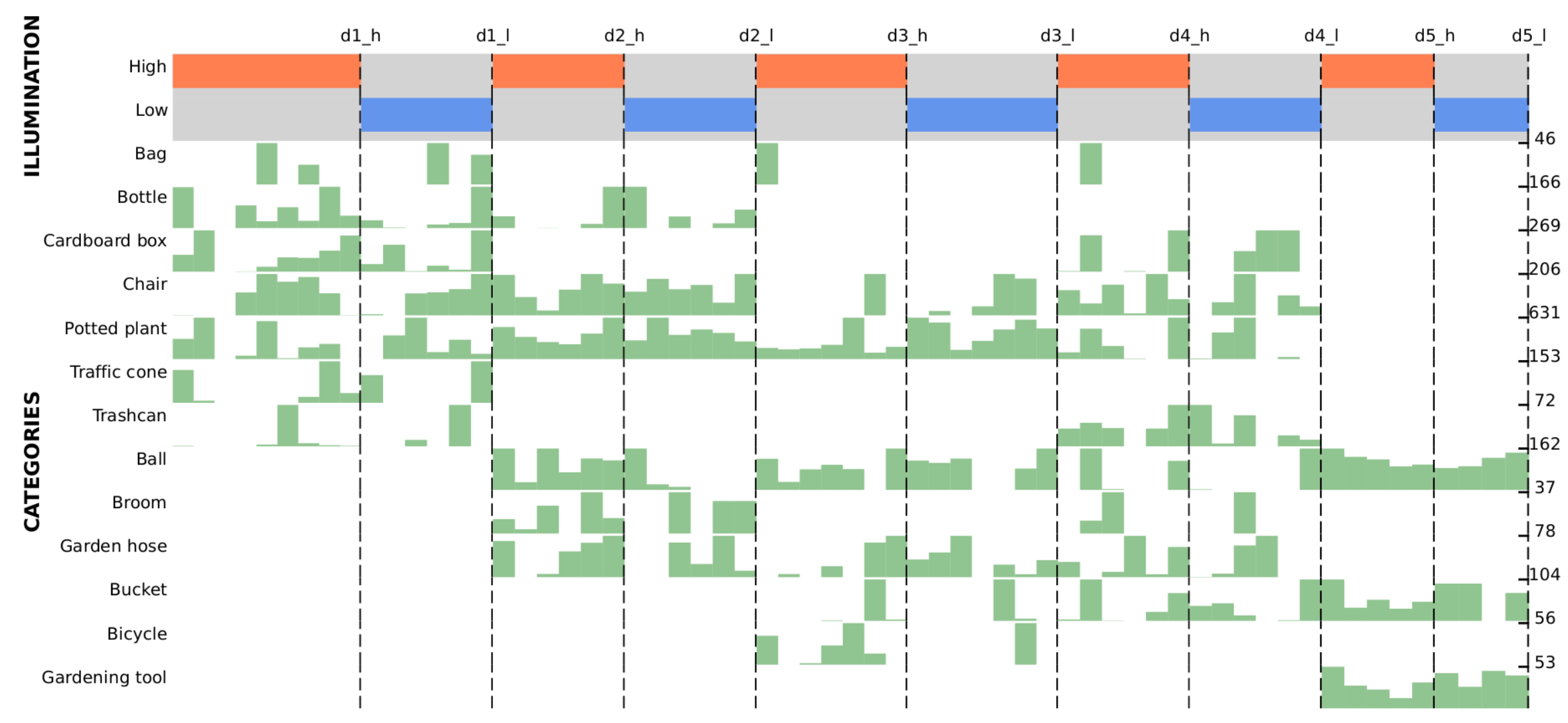
| Number of Classes | 13 |
| Data Format | png |
| Annotations | COCO format |
| Download Link | Download Dataset |
The distribution of labels across different tasks can be observed in the following figure.
💻 Data Preview
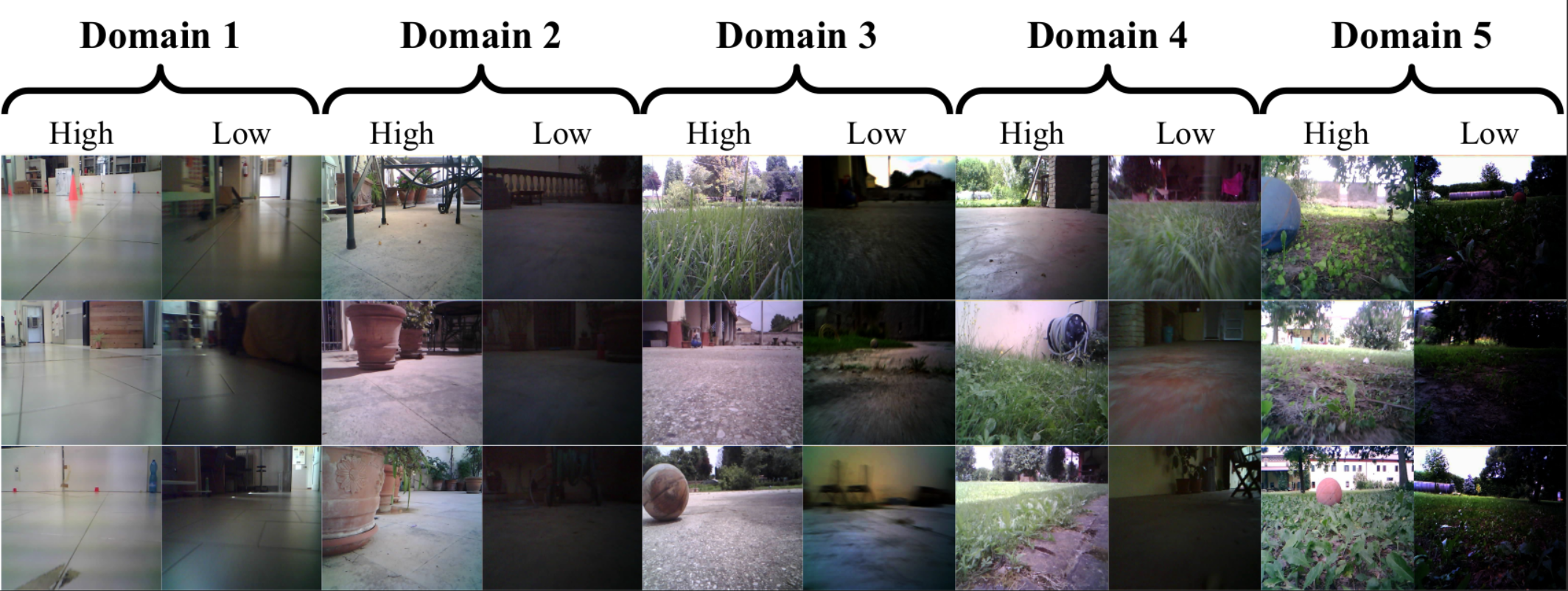
Here are some example frames from each of the 10 CL tasks:
📂 Folder Structure:
TiROD
├── Domain1
│ ├── High
│ │ ├── annotations
│ │ │ ├── train.json
│ │ │ ├── val.json
│ │ │ ├── test.json
│ │ ├── images
│ │ │ ├── train
│ │ │ │ ├── frame1.png
│ │ │ │ ├── ...
│ │ │ ├── val
│ │ │ │ ├── ...
│ │ │ ├── test
│ │ │ │ ├── ...
│ ├── Low
│ │ ├── ...
├── ...
└── docs
└── README.md
TiROD Cross-Domain Benchmark results
| Method | Final mAP ↑ | RSD ↑ | RPD ↑ |
|---|---|---|---|
| Fine-Tuning | 10.7 | 0.17 | 0.97 |
| LWF | 12.6 | 0.27 | 0.98 |
| IncDet | 12.9 | 0.18 | 0.91 |
| SID | 16.4 | 0.41 | 0.84 |
| Replay | 37.8 | 0.70 | 0.74 |
| Temporal Replay | 25.9 | 0.50 | 0.96 |
| K-Means Replay | 42.5 | 0.77 | 0.95 |
| Latent Distillation | 14.5 | 0.38 | 0.76 |
| Latent Replay | 36.5 | 0.65 | 0.90 |
| Latent K-Means Replay | 37.8 | 0.68 | 0.90 |
| Cumlative Training [mAP] | 63% |
TiROD Intra-Domain Benchmark results
| Method | Final mAP ↑ | RSD ↑ | RPD ↑ |
|---|---|---|---|
| Fine-Tuning | 47.0 | 0.83 | 0.95 |
| LWF | 49.0 | 0.83 | 0.94 |
| IncDet | 45.9 | 0.82 | 0.95 |
| SID | 49.2 | 0.76 | 0.89 |
| Replay | 66.1 | 0.96 | 0.96 |
| Temporal Replay | 60.3 | 0.91 | 0.94 |
| K-Means Replay | 66.0 | 0.96 | 0.96 |
| Latent Distillation | 44.1 | 0.71 | 0.86 |
| Latent Replay | 62.5 | 0.93 | 0.91 |
| Latent K-Means Replay | 62.6 | 0.94 | 0.94 |
| Cumlative Training [mAP] | 70.6 % |
To replicate the results, clone this repository and follow the instructions of the Readme.md There is also a YOLOv8 nano implementation, you can find it in this repository repository
🤝 Contribute to TiROD
We actively encourage the community to expand the dataset/benchmark. If you are working on tiny robotics and have collected object detection data in new domains, we would love to integrate it into the TiROD benchmark!
How to Contribute
To ensure compatibility with the existing benchmark, contributed datasets should meet the following requirements:
- Annotations: Bounding boxes must be provided in standard COCO JSON format.
- Sequential Data: Data should ideally be sequentially sampled (video frames) to allow for temporal and continual learning analysis.
- Hardware Specs: You must be able to provide basic specifications of your setup (e.g., Robot platform, Camera model, FPS).
👉 Submit your dataset via our Contribution Form
All accepted contributions will be integrated into the TiROD benchmark, and contributors will be fully credited on this repository and the project website. Additional sensor modalities (like IMU or Wheel Odometry), are also welcome!
Citation
If you find this project useful in your research, please add a star and cite us 😊
@misc{pasti2026tirod,
title={TiROD: Tiny Robotics Dataset and Benchmark for Continual Object Detection},
author={Francesco Pasti and Riccardo De Monte and Davide Dalle Pezze and Gian Antonio Susto and Nicola Bellotto},
year={2026},
eprint={2409.16215},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2409.16215},
}
Related works
@inproceedings{pasti2024LatentDistillation,
title={Latent Distillation for Continual Object Detection at the edge.},
author={Pasti, Francesco and Ceccon, Marina and Dalle Pezze, Davide and Paissan, Francesco and Farella, Elisabetta and Susto, Gian Antonio and Bellotto, Nicola},
booktitle={ECCV 2024 Workshops},
year={2024},
publisher={Springer}
}
https://github.com/pastifra/Continual_Nanodet